Facilities
LunaLab
This Laboratory is a lunar analogue facility that consists of a close structure of 11x7 meters filled with 20 tons of basalt to try to emulate the surface of the moon. It is equipped with 12 cameras of a motion capture system and 3 IP cameras to register the experiments. The Laboratory is illuminated with a cinema lamp hanging from a ceiling rail that permits to change the amount, the location and direction of the illumination. The purpose of this illumination is to generate a similar illumination to the polar regions of the Moon that is between 3 and 6 degrees.

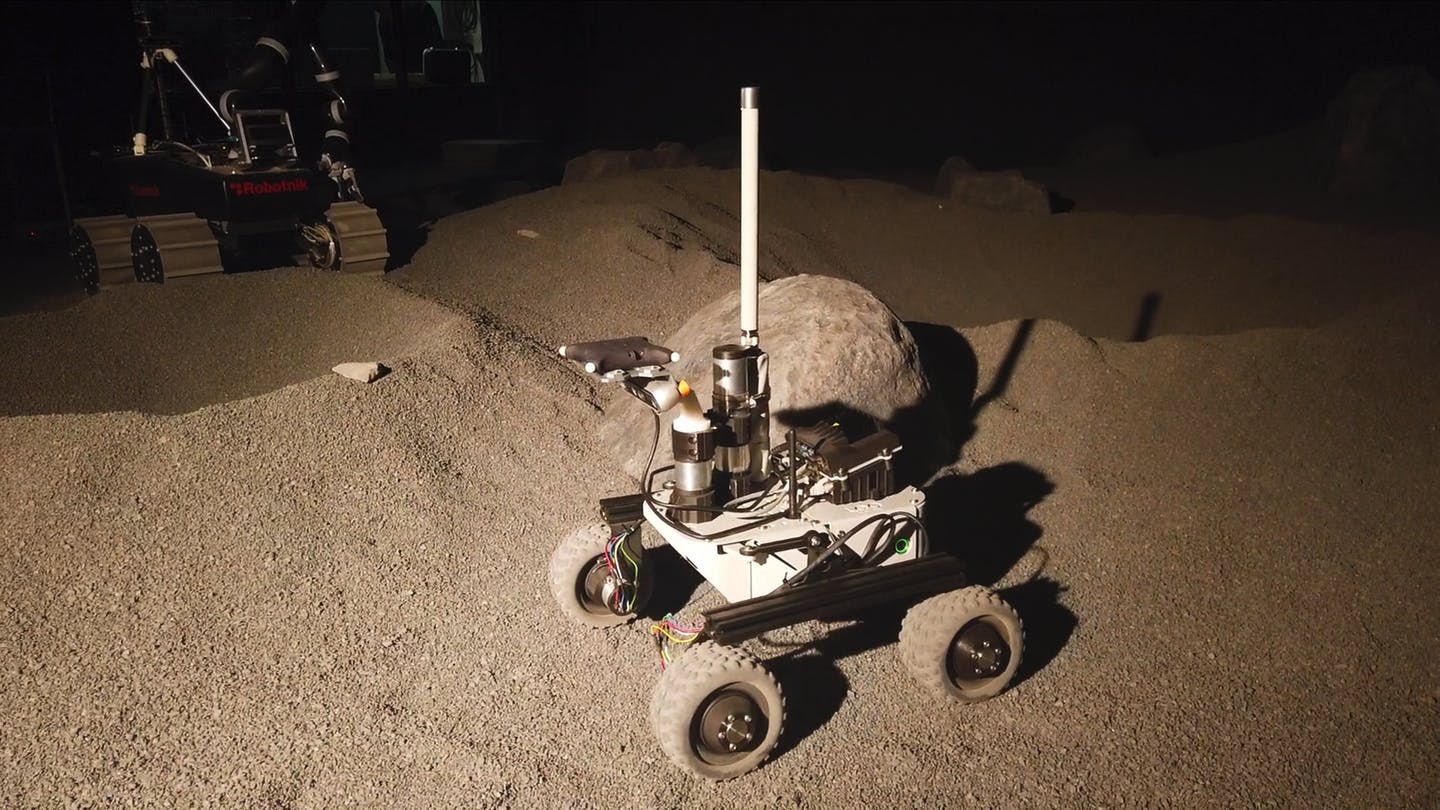

The experiments to perform in this Lab are focused on the use of lunar mobile robotic systems and developed algorithms for autonomous navigation, localization, trajectory planning and control for the rover itself and for other robotics tools, such as a robotic arms or a robotic drilling systems, focusing on activities related to space resources search, detection, localization, identification, manipulation and transportation.
Zero-G Lab
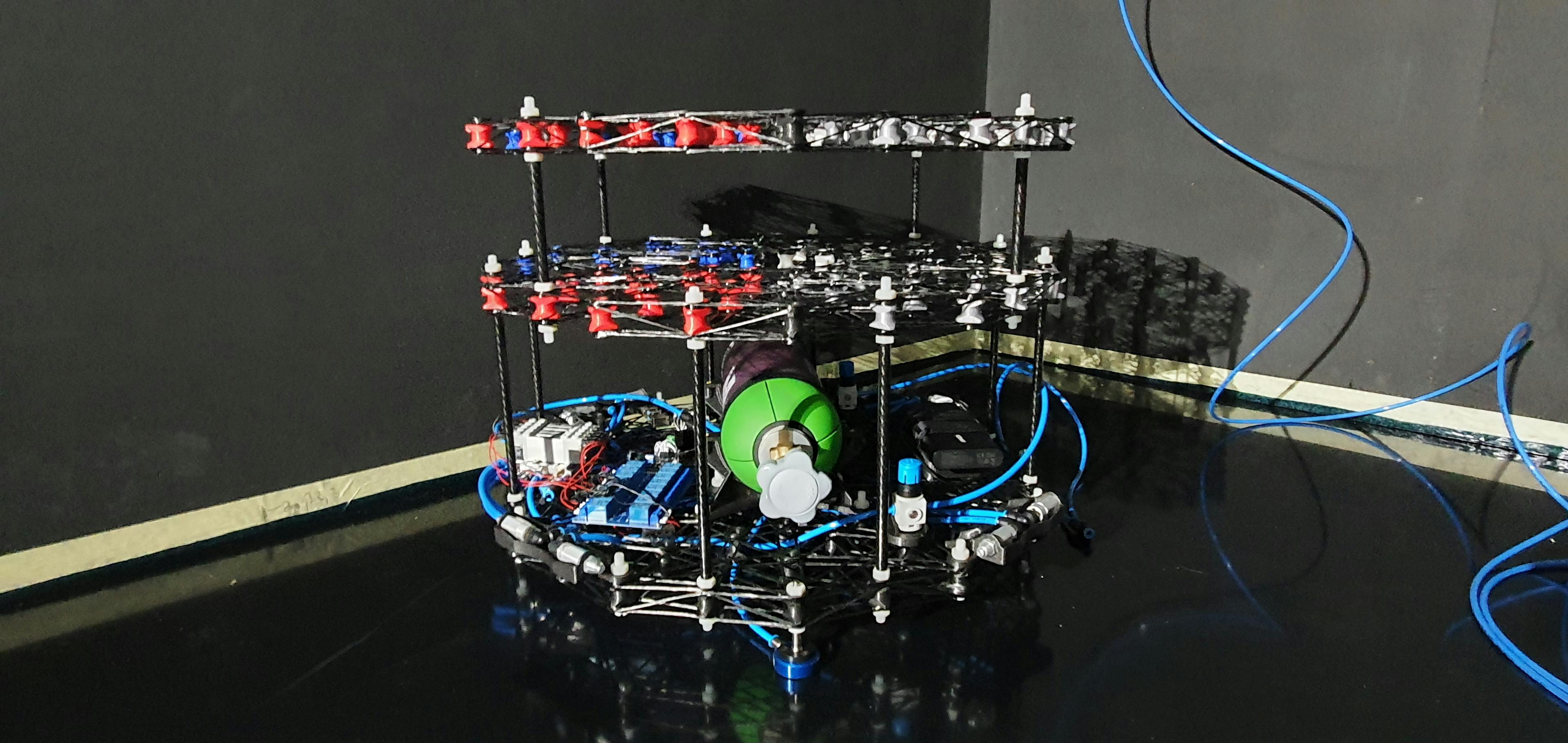
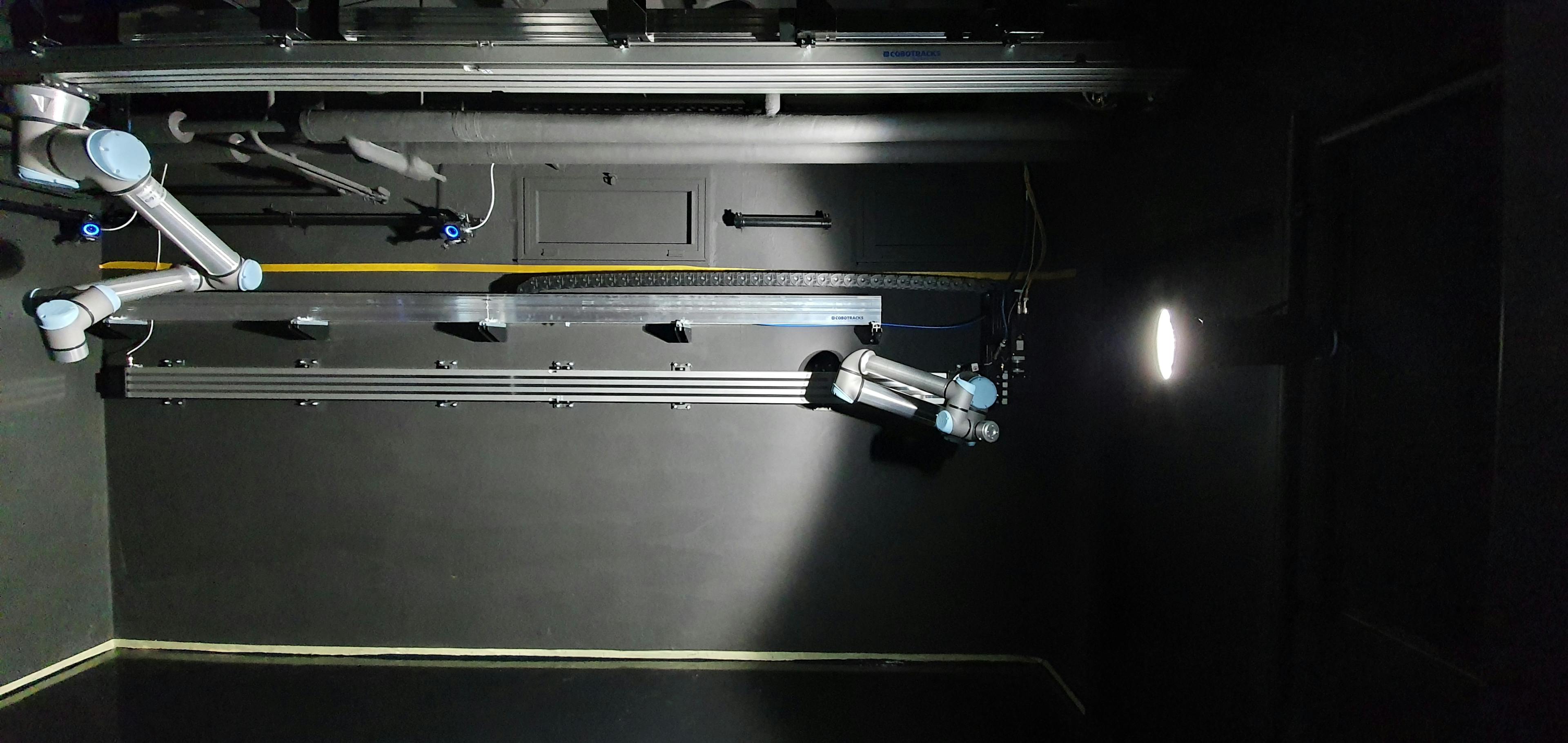
This Laboratory emulates orbital dynamics and orbital scenarios to simulate on-orbit operations and on-orbit redndezvous in a dark and close room of 3x5x2.30 meters (WxLxH). It consists of a 3x5 meters perfectly flat floor in where two identical pnematic and robotic floating platforms designed and constructed by SpaceR team emulate free floating objects in space and orbital dynamics within three degrees of freedom. This is done using air-bearing under the base of the floating platform that generate a air-cushion between the platform and the floor using air-compressed. In addtion, the floating platform are equipped with eigth nozzles that emulate the propulsion system of a satellite or spacecraft to navigate over the floor in a 2D environment. Furtheremore, to simualte a larger amount of orbital scenarios with higher degrees of freedom, the facility has two UR10e robotic arms mounted in one robotic rail each. One of the robotic rail is mounted on the ceilling and another one on the wall. The Zero-G Lab has also a sun simulator that could be mounted on the wall or in one of the robotic arms, it is completely painted in black and it equipped with a motion capture system to verify & validate the different algorithms.
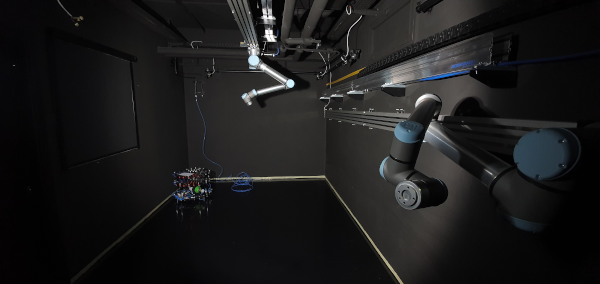
The experiments to perform in this infrastructure are related to autonomous navigation, target detection, identification, and localization, grasping and docking with cooperative and non-cooperative systems, among others.